登錄
登錄
 注冊
注冊
基于ZigBee技術的角度同步采集傳輸系統設計
作者:王文芳 劉玉
來源:中國電子設計網
日期:2010-01-15 09:18:59
摘要:本文所設計的“基于ZigBee技術的角度同步采集傳輸系統”,采用Microchip公司的PIC18LF4620微控制器和Chipcon公司的CC2420射頻芯片共同組成無線節點,置于關節臂式測量機的每個關節內,實現角度信號的讀取和無線傳輸。在工控機側,也安裝有一個無線節點,用于接收這些無線傳輸的角度信息并上傳給工控機。信號傳輸的無線化使得測量機的關節可以無限制旋轉。下面主要以六關節臂式測量機為例,介紹該系統的設計方案。
0 引言
關節臂式測量機廣泛用于模具、汽車零部件、鈑金件、塑料制品、木制品、雕塑等的快速檢測和逆向設計。其工作機理是:手持關節臂,帶動測量機頂端的攝像頭或探針掃描至目標探測點,根據測量機各段臂長和各個關節所轉過的角度可求取出目標探測點的位置或坐標。測量機的工作關鍵在于讀取和及時傳輸各個關節的角度信息。
普通的關節臂式測量機在每個關節內都安裝有一個角度編碼盤,角度信號通過連接在關節臂內的電纜線傳輸至工控機。由于編碼器使用有線方式傳輸角度信息,臂內電纜多,連續旋轉多圈時臂內電纜將擰成“麻花”,使得測量機關節不能無限旋轉。
本文所設計的“基于ZigBee技術的角度同步采集傳輸系統”,采用Microchip公司的PIC18LF4620微控制器和Chipcon公司的CC2420射頻芯片共同組成無線節點,置于關節臂式測量機的每個關節內,實現角度信號的讀取和無線傳輸。在工控機側,也安裝有一個無線節點,用于接收這些無線傳輸的角度信息并上傳給工控機。信號傳輸的無線化使得測量機的關節可以無限制旋轉。下面主要以六關節臂式測量機為例,介紹該系統的設計方案。
1. 系統方案設計
整個系統實質上為一個由7個無線節點組成的星形無線網絡,如圖1所示。安裝在測量機6個關節內的無線節點分別和本關節內的角度編碼盤相連,采集編碼盤信息,并將提取出來的有效角度信息無線發送出去,構成星形網絡的6個網絡節點(以下稱為子節點)。作為網絡協調器的無線節點(以下稱為主節點)和工控機相連,采用時分復用的方式接收6個子節點無線傳輸的角度信息,經整理后通過串口發送給工控機。
2. 系統硬件結構及連接圖
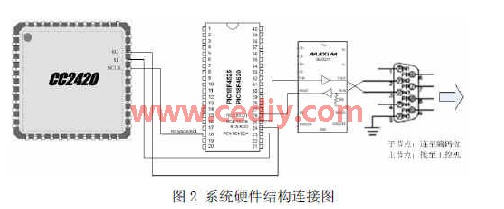
系統的硬件連接圖如圖2所示,元件主要包括射頻芯片CC2420、微控制器PIC18LF4620和串口電平轉換芯片MAX3221。對外提供的接口為RS232/485串口(圖2中以RS232為例)。每個無線節點內部,控制模塊(PIC18LF4620)和射頻模塊(CC2420)通過SPI接口連接,主要包括串行數據輸出引腳(SDO)、 串行數據輸入(SDI)引腳和串行時鐘(SCK)引腳。對于主節點,微控制器的串口輸出引腳(TX)和串口輸入引腳(RX)經由電平轉換芯片MAX3221和工控機相連。對于子節點,微控制器通常通過RS232/RS485串口和編碼盤相連,具體接口視編碼盤型號而定。
3. 組網過程
7個無線節點組成一個星形無線網絡,以主節點為協調器,6個子節點為網絡節點。組網的過程可以描述如下:
(1) 將主節點和所有子節點的無線收發頻率置于同一信道,確保該信道上無其它無線設備。
(2) 主節點無線發送組網廣播,告知同信道的所有處于接收狀態的無線設備(各子節點)自己為網絡協調器,并告知該網絡的PAN ID,以及主節點自己的64位MAC地址。同時,設定廣播報文的最大重傳次數,并開啟廣播超時定時器。
(3) 各個子節點在接收到廣播之后回應一個網絡連接請求。
(4) 當主節點收到子節點的網絡連接請求時,主節點給該子節點分配16位的網絡地址。
(5) 定時器超時,主節點檢查是否收到了所有子節點的網絡連接請求。“是”則停止組網廣播,組網成功。“否”則重傳組網廣播,重傳次數減1。
(6) 重復步驟(5),若重傳次數已經自減為0,停止組網廣播,組網結束,并告知工控機本次組網失敗。
4. 數據傳輸
4.1 幀格式定義
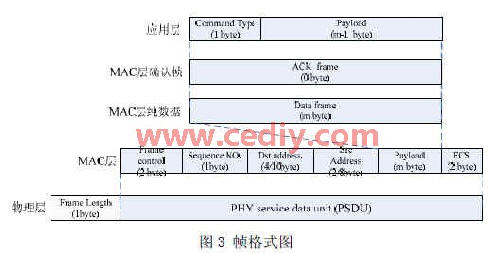
在本文所設計的星形無線網絡中,共分為物理層、MAC層和應用層3層,各層的幀格式如圖3所示。網間傳輸的信息從幀類型上分為3種,分別為數據幀、確認幀和命令幀,組網廣播幀和角度采集廣播歸屬于命令幀。
注:Frame Length為物理層幀長度;Frame Control域的低3位指示該信息的幀類型;Sequence NO.為序列號;FCS為校驗域。Command Type為命令類型,指示收到命令幀之后無線節點所需進行的操作。
4.2 TDMA時隙分配和傳輸協議
主節點和各子節點采取時分復用TDMA的方式進行通信,每個子節點在指定的時隙內和主節點進行信息交互。在本文所設計的星型無線網絡中,共劃分有8個時隙,如圖4所示。
每個時隙內,主節點發送“開始傳輸角度信息”的命令幀至指定子節點,并啟動時隙超時定時器。子節點在接收到該命令幀后,立刻將從編碼盤信息中提取出的有效角度信息封裝成幀,經由射頻模塊發送給主節點。當定時器超時時,主節點若還未收到該子節點的角度信息幀,或收到角度信息幀但校驗錯誤,則記錄該子節點的編號(以便在重傳時隙內令其重發),并轉入輪詢下一子節點。若接收到正確報文,則直接轉入下一子節點的輪詢。
4.3 子節點采集時刻同步
組網完成之后,主節點無線發送角度采集廣播給各個子節點,指示其以一定頻率采集編碼盤信息,提取并發送有效的角度信息。由于主節點以無線方式發送角度采集廣播,該廣播到達各個子節點的時間可能并不一致。若子節點在收到該廣播后立刻開始讀取編碼盤信息,子節點所讀到并提取的關節角度并不是同一時刻點的,導致測量機無法準確工作,所以需要有“子節點采集時刻同步”的環節。
我們采取的做法是:在組網完成之后,主節點發送角度采集廣播之前, 6個子節點逐一與主節點進行信息交互,子節點求取出信息幀的空中傳輸時間ti(i為子節點的編號,i=1,2…6;)。當所有子節點接收到主節點發送的角度采集廣播后,分別延遲(T – ti)時間再采集編碼盤信息,其中T為常數,T>max[t1, t2, …t6]。那么,從主節點發送角度采集廣播的那一時刻開始,各子節點都經過了[ti +(T – ti)] = T時間后讀取編碼盤信息,實現了子節點采集時刻同步。
求取信息幀空中傳輸時間ti的具體過程如圖5所示。子節點i在Ti1時刻發送一個“請求時間校正幀”給主節點,主節點在Ti2時刻收到該幀,并于Ti3時刻回復第一個應答幀,應答幀的內容為時刻Ti2。子節點在Ti4時刻收到應答幀,獲得時間Ti2。主節點在Ti3時刻后任意延遲一段時間發送第二個應答幀,應答幀的內容為時刻Ti3,使子節點能在某時刻獲取時間Ti3。
假設主節點的時鐘超前子節點△Ti,信息幀的空中傳輸時間為ti,可得:
Ti2 = Ti1 + △Ti + ti ①
Ti4 = Ti3 - △Ti + ti ②
由式①和②聯立可得:
△Ti = (Ti2 - Ti1 - Ti4 + Ti3)/2
ti = (Ti2 - Ti1 + Ti4 - Ti3)/2
5. 主節點和工控機的通信
主節點和工控機采用RS-232 串行數據傳輸,串行口通信方式為異步串行通信,速率為19200bps,信息格式為1位開始位、8 位數據位、1個停止位、無奇偶校驗位,采用中斷方式進行數據傳輸。以下是串口初始化程序片斷:
void ConsoleInit(void)
{
#if defined(USART_USE_BRGH_HIGH)
TXSTA = 0x24; //設置串口發送狀態寄存器
#else
TXSTA = 0x20;
#endif
RCSTA = 0x90; //設置串口接收狀態寄存器
// SPBRG_VAL = CLOCK_FREQ/BAUD_RATE/64 – 1,BAUD_RATE=19200bps
SPBRG = SPBRG_VAL;
TXIE = 1; //默認情況下串口處于發送狀態,使能發送中斷
TXIP = 1;
//RCIE = 1; //若需要執行串口接收,使能發送中斷
//RCIP = 1;
}
6. 結論
將信息傳輸無線化,可免去關節臂式測量機的臂內電纜線,實現關節的無限旋轉。本文設計的“基于ZigBee技術的角度同步采集傳輸系統”的無線硬件設計、軟件設計解決方案經測試運行穩定,無線通信誤碼率低、可靠性高、安全性好。在室內測試環境下,無線收發速率可以穩定達到18kbps,重傳后誤碼率不高于10¬-5數量級.
本文作者創新點:將ZigBee無線通信技術與機械測量相結合,設計了一套基于ZigBee技術的角度同步采集傳輸系統,應用在關節臂式測量機上,實現了關節的無限旋轉。
關節臂式測量機廣泛用于模具、汽車零部件、鈑金件、塑料制品、木制品、雕塑等的快速檢測和逆向設計。其工作機理是:手持關節臂,帶動測量機頂端的攝像頭或探針掃描至目標探測點,根據測量機各段臂長和各個關節所轉過的角度可求取出目標探測點的位置或坐標。測量機的工作關鍵在于讀取和及時傳輸各個關節的角度信息。
普通的關節臂式測量機在每個關節內都安裝有一個角度編碼盤,角度信號通過連接在關節臂內的電纜線傳輸至工控機。由于編碼器使用有線方式傳輸角度信息,臂內電纜多,連續旋轉多圈時臂內電纜將擰成“麻花”,使得測量機關節不能無限旋轉。
本文所設計的“基于ZigBee技術的角度同步采集傳輸系統”,采用Microchip公司的PIC18LF4620微控制器和Chipcon公司的CC2420射頻芯片共同組成無線節點,置于關節臂式測量機的每個關節內,實現角度信號的讀取和無線傳輸。在工控機側,也安裝有一個無線節點,用于接收這些無線傳輸的角度信息并上傳給工控機。信號傳輸的無線化使得測量機的關節可以無限制旋轉。下面主要以六關節臂式測量機為例,介紹該系統的設計方案。
1. 系統方案設計
整個系統實質上為一個由7個無線節點組成的星形無線網絡,如圖1所示。安裝在測量機6個關節內的無線節點分別和本關節內的角度編碼盤相連,采集編碼盤信息,并將提取出來的有效角度信息無線發送出去,構成星形網絡的6個網絡節點(以下稱為子節點)。作為網絡協調器的無線節點(以下稱為主節點)和工控機相連,采用時分復用的方式接收6個子節點無線傳輸的角度信息,經整理后通過串口發送給工控機。

2. 系統硬件結構及連接圖
系統的硬件連接圖如圖2所示,元件主要包括射頻芯片CC2420、微控制器PIC18LF4620和串口電平轉換芯片MAX3221。對外提供的接口為RS232/485串口(圖2中以RS232為例)。每個無線節點內部,控制模塊(PIC18LF4620)和射頻模塊(CC2420)通過SPI接口連接,主要包括串行數據輸出引腳(SDO)、 串行數據輸入(SDI)引腳和串行時鐘(SCK)引腳。對于主節點,微控制器的串口輸出引腳(TX)和串口輸入引腳(RX)經由電平轉換芯片MAX3221和工控機相連。對于子節點,微控制器通常通過RS232/RS485串口和編碼盤相連,具體接口視編碼盤型號而定。
3. 組網過程
7個無線節點組成一個星形無線網絡,以主節點為協調器,6個子節點為網絡節點。組網的過程可以描述如下:
(1) 將主節點和所有子節點的無線收發頻率置于同一信道,確保該信道上無其它無線設備。
(2) 主節點無線發送組網廣播,告知同信道的所有處于接收狀態的無線設備(各子節點)自己為網絡協調器,并告知該網絡的PAN ID,以及主節點自己的64位MAC地址。同時,設定廣播報文的最大重傳次數,并開啟廣播超時定時器。
(3) 各個子節點在接收到廣播之后回應一個網絡連接請求。
(4) 當主節點收到子節點的網絡連接請求時,主節點給該子節點分配16位的網絡地址。
(5) 定時器超時,主節點檢查是否收到了所有子節點的網絡連接請求。“是”則停止組網廣播,組網成功。“否”則重傳組網廣播,重傳次數減1。
(6) 重復步驟(5),若重傳次數已經自減為0,停止組網廣播,組網結束,并告知工控機本次組網失敗。
4. 數據傳輸
4.1 幀格式定義
在本文所設計的星形無線網絡中,共分為物理層、MAC層和應用層3層,各層的幀格式如圖3所示。網間傳輸的信息從幀類型上分為3種,分別為數據幀、確認幀和命令幀,組網廣播幀和角度采集廣播歸屬于命令幀。
注:Frame Length為物理層幀長度;Frame Control域的低3位指示該信息的幀類型;Sequence NO.為序列號;FCS為校驗域。Command Type為命令類型,指示收到命令幀之后無線節點所需進行的操作。
4.2 TDMA時隙分配和傳輸協議
主節點和各子節點采取時分復用TDMA的方式進行通信,每個子節點在指定的時隙內和主節點進行信息交互。在本文所設計的星型無線網絡中,共劃分有8個時隙,如圖4所示。

每個時隙內,主節點發送“開始傳輸角度信息”的命令幀至指定子節點,并啟動時隙超時定時器。子節點在接收到該命令幀后,立刻將從編碼盤信息中提取出的有效角度信息封裝成幀,經由射頻模塊發送給主節點。當定時器超時時,主節點若還未收到該子節點的角度信息幀,或收到角度信息幀但校驗錯誤,則記錄該子節點的編號(以便在重傳時隙內令其重發),并轉入輪詢下一子節點。若接收到正確報文,則直接轉入下一子節點的輪詢。
4.3 子節點采集時刻同步
組網完成之后,主節點無線發送角度采集廣播給各個子節點,指示其以一定頻率采集編碼盤信息,提取并發送有效的角度信息。由于主節點以無線方式發送角度采集廣播,該廣播到達各個子節點的時間可能并不一致。若子節點在收到該廣播后立刻開始讀取編碼盤信息,子節點所讀到并提取的關節角度并不是同一時刻點的,導致測量機無法準確工作,所以需要有“子節點采集時刻同步”的環節。
我們采取的做法是:在組網完成之后,主節點發送角度采集廣播之前, 6個子節點逐一與主節點進行信息交互,子節點求取出信息幀的空中傳輸時間ti(i為子節點的編號,i=1,2…6;)。當所有子節點接收到主節點發送的角度采集廣播后,分別延遲(T – ti)時間再采集編碼盤信息,其中T為常數,T>max[t1, t2, …t6]。那么,從主節點發送角度采集廣播的那一時刻開始,各子節點都經過了[ti +(T – ti)] = T時間后讀取編碼盤信息,實現了子節點采集時刻同步。
求取信息幀空中傳輸時間ti的具體過程如圖5所示。子節點i在Ti1時刻發送一個“請求時間校正幀”給主節點,主節點在Ti2時刻收到該幀,并于Ti3時刻回復第一個應答幀,應答幀的內容為時刻Ti2。子節點在Ti4時刻收到應答幀,獲得時間Ti2。主節點在Ti3時刻后任意延遲一段時間發送第二個應答幀,應答幀的內容為時刻Ti3,使子節點能在某時刻獲取時間Ti3。

假設主節點的時鐘超前子節點△Ti,信息幀的空中傳輸時間為ti,可得:
Ti2 = Ti1 + △Ti + ti ①
Ti4 = Ti3 - △Ti + ti ②
由式①和②聯立可得:
△Ti = (Ti2 - Ti1 - Ti4 + Ti3)/2
ti = (Ti2 - Ti1 + Ti4 - Ti3)/2
5. 主節點和工控機的通信
主節點和工控機采用RS-232 串行數據傳輸,串行口通信方式為異步串行通信,速率為19200bps,信息格式為1位開始位、8 位數據位、1個停止位、無奇偶校驗位,采用中斷方式進行數據傳輸。以下是串口初始化程序片斷:
void ConsoleInit(void)
{
#if defined(USART_USE_BRGH_HIGH)
TXSTA = 0x24; //設置串口發送狀態寄存器
#else
TXSTA = 0x20;
#endif
RCSTA = 0x90; //設置串口接收狀態寄存器
// SPBRG_VAL = CLOCK_FREQ/BAUD_RATE/64 – 1,BAUD_RATE=19200bps
SPBRG = SPBRG_VAL;
TXIE = 1; //默認情況下串口處于發送狀態,使能發送中斷
TXIP = 1;
//RCIE = 1; //若需要執行串口接收,使能發送中斷
//RCIP = 1;
}
6. 結論
將信息傳輸無線化,可免去關節臂式測量機的臂內電纜線,實現關節的無限旋轉。本文設計的“基于ZigBee技術的角度同步采集傳輸系統”的無線硬件設計、軟件設計解決方案經測試運行穩定,無線通信誤碼率低、可靠性高、安全性好。在室內測試環境下,無線收發速率可以穩定達到18kbps,重傳后誤碼率不高于10¬-5數量級.
本文作者創新點:將ZigBee無線通信技術與機械測量相結合,設計了一套基于ZigBee技術的角度同步采集傳輸系統,應用在關節臂式測量機上,實現了關節的無限旋轉。


.jpg)