
 登錄
登錄
 注冊
注冊
基于CAN總線和RFID技術(shù)的礦井定位系統(tǒng)設(shè)計
引 言
近年來,礦井安全事故頻發(fā)。在分析近期幾個煤礦特大事故時發(fā)現(xiàn)幾個共性問題:地面與井下人員的信息溝通不及時;煤礦事故發(fā)生后,搶險救災(zāi)安全救護的效率低,搜救效果差 。為了在礦難發(fā)生后能夠迅速確認礦難位置和被困員工人數(shù),以最快的速度開展營救工作,保障礦工的生命安全,在礦井中布置基于高新技術(shù)的安全監(jiān)控管理系統(tǒng)勢在必行。
本文設(shè)計了1個基于CAN總線網(wǎng)絡(luò)和射頻識別技術(shù)的礦井定位系統(tǒng),該系統(tǒng)可以實時地將礦井
下人員及礦車的當前位置通過CAN總線網(wǎng)絡(luò)傳送到位于地面的上位機,不僅可以掌握井下作業(yè)情況,而且一旦發(fā)生安全事故,可以立刻確定被困人員所處的位置及人數(shù),以便迅速展開救援工作。
1 、RFID技術(shù)和CAN總線簡介
射頻識別(RFID,Radio Frequency Identification)技術(shù)是利用無線電波進行通信的一種非接觸式自動識別技術(shù)。射頻識別系統(tǒng)由讀寫器和電子標簽(Tag)組成 ,每個Tag具有1個全球唯一的ID號,可以與讀寫器進行無接觸的信息交換。根據(jù)射頻識別系統(tǒng)的工作頻率,可分為低頻(100—500 kHz)、中頻(10—15 MHz)、射頻(850—950 MHz)和微波(2.45—5.8 GHz)系統(tǒng),不同的工作頻段影響系統(tǒng)的讀寫距離。按Tag的供電方式,可分為有源和無源兩類。
有源Tag需要電源供電,讀寫距離遠,但使用不方便,價格高,壽命有限;無源Tag使用讀卡器天線發(fā)射的電磁波的能量,因此無源Tag的讀寫距離有限,但壽命長、體積小。基于在礦井下使用的特殊環(huán)境,將Tag嵌人到礦工的安全帽或皮帶中,因此本系統(tǒng)使用無源Tag,增加其使用壽命。低頻和中頻系統(tǒng)對Tag的讀寫距離只有10 cm左右,射頻系統(tǒng)的讀寫距離可達7 m 左右,微波系統(tǒng)(主要使用有源Tag)可達幾十米。由于礦井下需要相對精確的定位信息,而且還要讀寫方便,本系統(tǒng)選擇工作在射頻波段,需要在礦井中每隔15m左右安裝1個讀寫器。
CAN(Controller Area Network)總線最早由德國BOSCH公司提出,主要用于汽車內(nèi)部測量與控制中心之間的數(shù)據(jù)通信。由于其良好的性能,廣泛應(yīng)用于其他領(lǐng)域當中,并逐漸成為主要通訊手段。其主要特點有:國際標準的工業(yè)級現(xiàn)場總線,傳輸可靠,實時性高 ;傳輸距離遠(無中繼最遠10 km),傳輸速率快(最高1 bit/s);單條總線最多可接1 10個節(jié)點,并可方便的擴充節(jié)點數(shù);報文為短幀結(jié)構(gòu)并有硬件CRC校驗,受干擾概率小,數(shù)據(jù)出錯率極低;出錯的CAN節(jié)點會自動關(guān)閉并切斷和總線的聯(lián)系,不影響總線的通訊;非破壞性總線仲裁技術(shù),可多節(jié)點同時向總線發(fā)數(shù)據(jù),總線利用率高;總線上各節(jié)點的地位平等,不分主從,突發(fā)數(shù)據(jù)可實時傳輸;具有硬件地址濾波功能,可簡化軟件的協(xié)議編制;CAN—bus 總線系統(tǒng)結(jié)構(gòu)簡單,性價比極高。當?shù)V井通訊網(wǎng)絡(luò)需求達到更遠的通訊距離(大于10 km),或者終端數(shù)目較多(大于110個)時,安裝CANbridge網(wǎng)橋可以成倍地延長通訊距離,也可以成倍地增加CAN—bus網(wǎng)絡(luò)中終端設(shè)備的數(shù)目。而且在礦井中使用CAN總線網(wǎng)絡(luò)還有利于將礦井中相互獨立的各種類型系統(tǒng)互通,進行統(tǒng)一管理。
2、 礦井定位系統(tǒng)硬件設(shè)計
礦井定位系統(tǒng)結(jié)構(gòu)如圖1所示。本系統(tǒng)中監(jiān)控器位于地面的監(jiān)控室,通過CAN轉(zhuǎn)換卡與CAN總線相連,其上運行由Visual C++編寫的監(jiān)控軟件,可以動態(tài)顯示礦工當前位于哪一基站附近,還可以向某些基站發(fā)出查詢命令,查詢某一員工當前位置;射頻讀寫器作為基站安裝在礦井中的已知位置,通過CAN總線與其他基站和監(jiān)控器相連;礦工進入礦井時都要佩戴安全帽或腰帶(內(nèi)嵌電子標簽),并且電子標簽的ID已與監(jiān)控系統(tǒng)信息相關(guān)聯(lián)。當通信距離長、基站節(jié)點數(shù)量多時,可以使用CANbridge延長CAN總線網(wǎng)絡(luò)。

圖1 礦井定位系統(tǒng)結(jié)構(gòu)
本系統(tǒng)使用的無源電子標簽是TI公司的RI—UHF—STRAP一08,其符合EPCglobal TM Gen2(v. 1.0.9)和ISO/IEC 18000—6c協(xié)議標準,內(nèi)置192bit的存儲器(96bit的EPC存儲器、32bit的操作密碼、32bit的KILL密碼、32bit的Tag—ID存儲器),工作在860~960MHz的頻段,但此頻段還未推出專用的讀寫器模塊,因此本系統(tǒng)的重點是射頻讀寫器的研制。讀寫器的結(jié)構(gòu)如圖2所示。
考慮到礦井中的設(shè)備需要防爆安全認證,本系統(tǒng)設(shè)計中盡可能地減少外圍芯片數(shù)量。MCU采用美國微芯公司的PIC1 8F4580單片機,此單片機集成了基于ECAN技術(shù)的CAN總線控制模塊、lO位A/D模塊、增強的通用串口模塊、32KB的增強型Flash存儲器等,內(nèi)部資源豐富,簡化了系統(tǒng)設(shè)計。
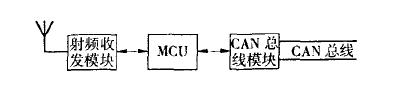
圖2 讀寫器的結(jié)構(gòu)
射頻收發(fā)模塊使用AD公司的可編程射頻收發(fā)芯片ADF7020,工作頻率為431~478 MHz和862~956MHz波段,收發(fā)過程工作在半雙工方式,支持ASK/FSK/OOK/GFsK等多種調(diào)制方式。CAN總線驅(qū)動器使用的是致遠電子的通用CAN收發(fā)器芯片CTM8251A,此芯片將傳統(tǒng)的CAN總線驅(qū)動電路的光電隔離和CAN驅(qū)動器集成到一塊芯片,提高了通信的可靠性。
2.1 PICl8F458O與CTM825lA 的接口電路PIC18F4580帶有CAN控制模塊,支持CAN1.2、CAN2.0A、CAN2.0B協(xié)議,只需外接CAN驅(qū)動器即可實現(xiàn)CAN模塊的硬件設(shè)計,接口電路如圖3所示。CAN發(fā)器芯片CTM8251A具有DC 2 500 V隔離功能,符合ISO 11898標準,數(shù)據(jù)速率最高達1Mbps,具有自動熱關(guān)斷保護功能,并且未上電或欠壓節(jié)點不會影響CAN總線的正常工作。
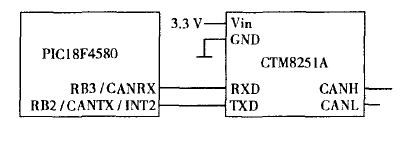
圖3 CAN模塊接口電路
2.2 PIC18F4580與ADF7020的接口電路
圖4為MCU與射頻收發(fā)模塊的接口電路。PIC18F4580單片機通過ADF7020的串行數(shù)據(jù)輸入引腳SDATA向ADF7020發(fā)送編程控制字,控制其工作方式,并可以通過串行數(shù)據(jù)讀回引腳SREAD讀取ADF7020的工作狀態(tài),SLE引腳作為控制字的鎖存信號。DATA I/O引腳是發(fā)送信號輸入和接收信號輸出分時復(fù)用引腳,收發(fā)工作在半雙工方式,因此MCU工作在半雙工的同步通信模式下,通過串行同步接口接收或發(fā)送數(shù)據(jù)。當ADF7020接收到一個來自天線的有效信號后,通過INT/LOCK引腳向MCU發(fā)出中斷信號。
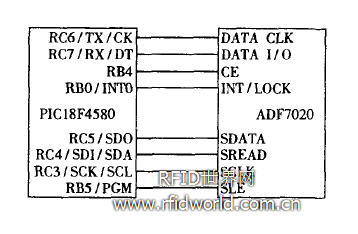
圖4 PIC18F4580與ADF7020的接口電路
3 、系統(tǒng)的軟件設(shè)計
本設(shè)計的編程環(huán)境是MPLAB IDE軟件并內(nèi)嵌MPLAB—C18,可以支持C語言編程。系統(tǒng)的軟件主要分為PIC18F4580初始化、ADF7020初始化、CAN數(shù)據(jù)收發(fā)、讀卡器與電子標簽間的通信算法等部分。
PIC18F4580初始化主要是對片內(nèi)各個功能模塊的初始化,包括:CAN模塊初始化,USART模塊初始化,WDT初始化,設(shè)置各個端口的方向等。ADF7020初始化主要包括:設(shè)置晶振電路的接人方式,信號的調(diào)制/解調(diào)方式(ISO/IEC 18000—6c標準中使用ASK),定義調(diào)制信號的調(diào)制輸出功率,打開VCO、PLL和輸入輸出時鐘等。在CAN數(shù)據(jù)收發(fā)程序中,讀寫器的MCU通過CAN總線向上位機實時發(fā)送讀寫器識別出的Tag的相關(guān)信息,而CPU接收來自上位機的控制命令數(shù)據(jù),其流程圖如圖5所示。
本系統(tǒng)要求讀寫器能夠識別到其覆蓋范圍內(nèi)的所有Tag,但在讀寫器覆蓋范圍內(nèi)的Tag會幾乎同時響應(yīng)讀寫器的指令,這樣響應(yīng)信號就會發(fā)生碰撞,導(dǎo)致通信失敗,讀寫器無法正確識別Tag。因此,讀寫器軟件系統(tǒng)要加人防碰撞算法,保證讀寫器能夠與電子標簽正確地交換信息。本系統(tǒng)使用支持ISO/IEC 18000—6c協(xié)議的電子標簽,規(guī)定使用基于概率類型的時隙隨機防碰撞算法。此算法的工作過程為:電子標簽進入讀寫器覆蓋范圍后進人Ready狀態(tài);讀寫器發(fā)送Select命令和Query命令信號(開始一個新的Round周期)并監(jiān)聽響應(yīng)信號;電子標簽收到Query命令后將一個16位的隨機(或偽隨機)數(shù)(數(shù)值范圍為0000H~3FFFH,即共有多達215個時隙可供使用)裝載到時隙計數(shù)器中,進入Arbitrate狀態(tài),當電子標簽每接收到一個QueryRep命令,時隙計數(shù)器就會進行減法操作(Query命令中規(guī)定了每次減的值Q,而且可以使用QueryAdjust命令修改先前的Query命令規(guī)定的Q值);
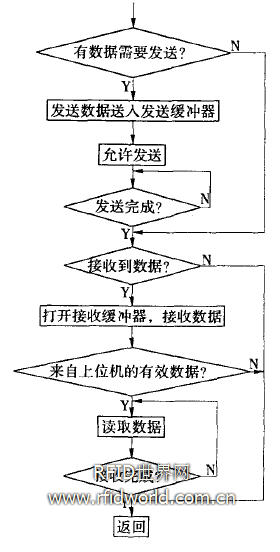
圖5 CAN收發(fā)程序流程圖
當計數(shù)器減為0時電子標簽就進入Reply狀態(tài),此時向讀寫器發(fā)出一個16 bit的(偽)隨機數(shù)作為應(yīng)答信號;如果電子標簽收到一個有效的ACK信號(正確包含自己向讀寫器發(fā)送的16 bit隨機數(shù)),那么電子標簽就會進入Acknowledged狀態(tài),否則如果沒有收到正確的ACK,則表明發(fā)生碰撞,返回Arbitrate狀態(tài);在確認狀態(tài)中,電子標簽向讀寫器發(fā)送包含自己的PC(Protocol Contro1)、EPC(Electronic Product Code)和16bit的CRC校驗等字段的信息;此后讀寫器向電子標簽發(fā)出Read命令,可以讀Tag的EPC和TID 的部分或全部內(nèi)容;讀取后Tag又回到Ready狀態(tài)。
讀卡器與電子標簽間的通信算法流程圖如圖6所示。
由于ISO/IEC 18000—6c協(xié)議使用基于概率類型的時隙隨機防碰撞算法,與ISO/IEC 18000—6a協(xié)議的ALOHA算法 和ISO/IEC 18000—6h協(xié)議的自適應(yīng)二進制數(shù)算法相比,由于時隙隨機防碰撞算法在Tag中使用時隙計數(shù)器進行防碰撞,大大簡化了讀寫器CPU的編程工作,并提高了讀寫器的工作效率。
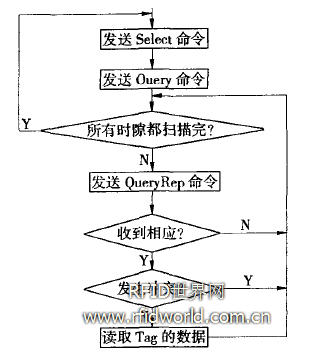
圖6 讀卡器與電子標簽問的通信算法流程圖
4、 結(jié)語
本文針對煤礦安全生產(chǎn)的需要,設(shè)計了基于RFID技術(shù)的礦井定位系統(tǒng)。為了提高系統(tǒng)的可靠性,減小防爆安全認證的難度,設(shè)計中使用高集成度芯片,以減少分立元件的數(shù)量。在讀寫器中實現(xiàn)了基于最新的ISO/IEC 18000—6c國際標準協(xié)議的軟件設(shè)計,不僅減小了沖突發(fā)生的概率,而且大大提高了讀寫器CPU的效率。讀寫器與上位機的通信使用了可靠性較高、礦井中廣泛使用的CAN總線技術(shù),使地面監(jiān)控室可以及時了解井下的工作狀況。
--------------------------------------------------------
國外煤礦安全信息
評定和保護電路安全火花的現(xiàn)代方法在烏克蘭、德國、法國、英國、美國和其他一些國家的主要試驗中心不允許采用微型電路作為防火花元件。但是在捷克和俄羅斯允許用微型電路作為ib水平電路的防火花元件。IEC60079—1 1標準不允許采用晶體三極管對ia水平電路作為限流器,因為不能計算瞬變過程。在馬克耶夫礦業(yè)安全研究院具有試驗設(shè)備安全火花的經(jīng)驗和每項工作的實踐,能完成靜態(tài)和動態(tài)中防火花元件負荷的評定。我們認為,在采用ia和ib水平電路條件中沒有太大的差別。在第一種情況下,不允許采用用過的晶體三極管,在第二種情況下,允許采用所有半導(dǎo)體儀器,因為ib水平電路在能產(chǎn)生爆炸危險濃度的混合氣體的條件中工作。我們根據(jù)國標計算確定出不同歐姆電路能量的安全火花系數(shù)。我們采用最小點燃電流(8.3% 的沼氣空氣混合體),在這種情況下,按放電能量的安全火花系數(shù)小于1。文中列出了計算結(jié)果:歐姆電路電壓 ,最小點燃電流,,不同放電能量的安全火花系數(shù)k.m,放電最大長度Z ,放電平均電流,r。在整流最小速度0.046 m/s情況下進行了計算。完善了評定電路安全火花的計算方法能夠進行評定微小電流的安全火花性和用于評定更危險的氫——空氣混合體。
摘自《 yronb YKPAI4HbI 》 2007













