
 登錄
登錄
 注冊
注冊
基于傳感器網絡和有源RFID的集裝箱管理系統
作者:張宏宇,柴逸飛,涂時亮,陳章龍
來源:RFID世界網
日期:2009-04-30 09:20:46
摘要:針對堆場集裝箱管理調度問題,結合傳感器網絡和有源RFID技術設計一個管理系統。提出4層架構解決方案,設計高效的傳輸協議和結合堆場實際情況的集裝箱定位算法。實驗結果表明,該系統有助于解決集裝箱管理中較易出現的并會帶來較大損失的“丟箱”問題,具有一定應用價值。
1 概述
目前集裝箱管理主要通過信息管理系統結合人工非實時性手工數據錄入來實現,有些先進的管理系統中采用圖像識別技術,利用攝像頭來識別箱號。這些傳統的對集裝箱的跟蹤、管理和調度方法存在效率低、人力成本高、出錯率高、實時性差等問題。電子標簽(RFID)技術被嘗試性地應用到集裝箱管理中,并取得了很好的效果。但RFID采用被動發射技術,在數據采集過程中對人員的依賴性很大,并且也未能較好解決對堆場內集裝箱信息的實時采集等問題。
無線傳感器網絡技術近幾年迅速發展,也是國內外學術界討論的熱點之一。該技術與同樣迅速發展的有源RFID技術有著密切聯系。本文結合這2種技術,通過對堆場的實際考察,提出4層架構的堆場集裝箱管理方案,設計結合堆場實際情況的傳輸協議和集裝箱定位算法,并完成一個可實際應用的系統。
2 基于傳感器網絡的集裝箱管理系統
2.1 集裝箱管理
集裝箱的管理主要可分為2個部分:(1)集裝箱的使用和調度管理,包括集裝箱的分配、調度、起租、退租、保險、修理、報失等集裝箱業務信息的管理;(2)集裝箱狀態信息的管理,包括集裝箱的位置信息、分類信息、箱體內貨物信息等。對于非實時信息,目前已經有相對成熟的集裝箱管理軟件。而對于第2部分中的很多信息,多數情況下通過增加大量人力成本來解決。本文所提出的傳感器網絡的應用主要是針對第2部分設計的,可有效提高集裝箱信息采集和管理的效率。
2.2 系統分析及架構
集裝箱堆場中有多個矩形的集裝箱堆放區域,每個區域可并列排放4個一6個箱子,每一排可疊放4層一6層,每個區域有1架集裝箱起重器來負責對區域內的集裝箱進行搬運操作,整個堆場有2.4 GHz的無線網絡覆蓋。圖l說明了系統的網絡結構。
節點的硬件結構如圖3所示。其中,控制芯片和發射芯片分別為MC9S08GT60” 微處理器與MC13192 2.4 GHz無線收發芯片 。第1類節點中安裝了加速度傳感器,用來感知集裝箱的運動狀態。第3類節點通過串ISI連接Levave公司提供的R36 GPS定位模塊,用于獲得集裝箱起重器的位置信息,并連接WLAN模塊來完成傳感器網絡與WLAN的橋接。
根據該特定的應用和網絡結構,在數據包和路由方面也進行了簡化。由于節點的收發距離都比較遠,因此在第2類節點之間不產生路由,即所有第2類節點收到和形成的數據均直接發送給第3類節點。網絡中的數據包格式包括數據包類型和數據包源、數據包目的地、數據包長度、數據內容4個可選內容。同時,在數據打包的過程中對數據進行了簡單的調整和壓縮,以減少數據包的長度。
此外,筆者充分利用所使用的芯片的特性來降低第1類節點的功耗。在低功耗睡眠狀態中,首先調用SMAC接口函數使無線收發芯片進入睡眠狀態,控制器進入STOP狀態。由于控制器進入STOP狀態的功耗約為正常工作的1/10 000,而收發芯片睡眠狀態與收發狀態的功耗比也約為1/10 000,與空閑狀態的功耗比為11200左右,因此,該等待方式可有效減少節點的功耗,延長節點的使用壽命。
2.4 集裝箱定位
本系統通過傳感器網絡來確定集裝箱的位置。為達到定位的目的,假定2個事實作為前提:(1)堆場中集裝箱堆放區域位置信息已知;(2)所有堆放區域中所堆放的集裝箱都由且只由該堆放區域中的集裝箱起重機操作完成。這樣首先可通過起重機上的GPS裝置來確定起重機的位置,然后可通過獲得起重機正在操作集裝箱的位置信息,由于堆放區域內所有的集裝箱操作都是由起重機來完成的,因此一旦獲得起重機所操作的集裝箱的位置信息,便可獲得堆放區域中所有集裝箱位置的改變信息,從而確定每個集裝箱的位置。
集裝箱的位置信息由第2類節點根據收到第1類節點的信號強度計算獲得。MC13192芯片提供計算輸入信號強度的功能,并由SMAC層的接口函數提供給上層應用。其感應靈敏度如圖5所示,最小輸入信號強度可達-85 dBm。
3 結束語
本文給出將無線傳感器網絡和有源RFID技術應用于集裝箱管理的一個實際案例,完成了符合該次應用的傳感器網絡架構設計與傳輸協議設計,并將傳感器網絡的定位方案引入集裝箱管理當中。仿真結果證明,該設計可提高集裝箱查找效率,節約人力成本和時間成本。
目前集裝箱管理主要通過信息管理系統結合人工非實時性手工數據錄入來實現,有些先進的管理系統中采用圖像識別技術,利用攝像頭來識別箱號。這些傳統的對集裝箱的跟蹤、管理和調度方法存在效率低、人力成本高、出錯率高、實時性差等問題。電子標簽(RFID)技術被嘗試性地應用到集裝箱管理中,并取得了很好的效果。但RFID采用被動發射技術,在數據采集過程中對人員的依賴性很大,并且也未能較好解決對堆場內集裝箱信息的實時采集等問題。
無線傳感器網絡技術近幾年迅速發展,也是國內外學術界討論的熱點之一。該技術與同樣迅速發展的有源RFID技術有著密切聯系。本文結合這2種技術,通過對堆場的實際考察,提出4層架構的堆場集裝箱管理方案,設計結合堆場實際情況的傳輸協議和集裝箱定位算法,并完成一個可實際應用的系統。
2 基于傳感器網絡的集裝箱管理系統
2.1 集裝箱管理
集裝箱的管理主要可分為2個部分:(1)集裝箱的使用和調度管理,包括集裝箱的分配、調度、起租、退租、保險、修理、報失等集裝箱業務信息的管理;(2)集裝箱狀態信息的管理,包括集裝箱的位置信息、分類信息、箱體內貨物信息等。對于非實時信息,目前已經有相對成熟的集裝箱管理軟件。而對于第2部分中的很多信息,多數情況下通過增加大量人力成本來解決。本文所提出的傳感器網絡的應用主要是針對第2部分設計的,可有效提高集裝箱信息采集和管理的效率。
2.2 系統分析及架構
集裝箱堆場中有多個矩形的集裝箱堆放區域,每個區域可并列排放4個一6個箱子,每一排可疊放4層一6層,每個區域有1架集裝箱起重器來負責對區域內的集裝箱進行搬運操作,整個堆場有2.4 GHz的無線網絡覆蓋。圖l說明了系統的網絡結構。

圖1 網絡結構
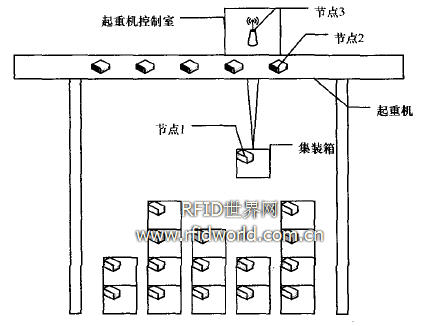
圖2 節點部署
節點的硬件結構如圖3所示。其中,控制芯片和發射芯片分別為MC9S08GT60” 微處理器與MC13192 2.4 GHz無線收發芯片 。第1類節點中安裝了加速度傳感器,用來感知集裝箱的運動狀態。第3類節點通過串ISI連接Levave公司提供的R36 GPS定位模塊,用于獲得集裝箱起重器的位置信息,并連接WLAN模塊來完成傳感器網絡與WLAN的橋接。
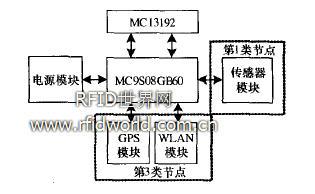
圖3 節點硬件結構
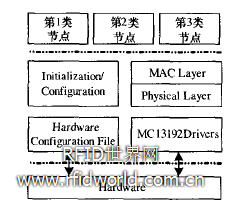
圖4 節點軟件結構
根據該特定的應用和網絡結構,在數據包和路由方面也進行了簡化。由于節點的收發距離都比較遠,因此在第2類節點之間不產生路由,即所有第2類節點收到和形成的數據均直接發送給第3類節點。網絡中的數據包格式包括數據包類型和數據包源、數據包目的地、數據包長度、數據內容4個可選內容。同時,在數據打包的過程中對數據進行了簡單的調整和壓縮,以減少數據包的長度。
此外,筆者充分利用所使用的芯片的特性來降低第1類節點的功耗。在低功耗睡眠狀態中,首先調用SMAC接口函數使無線收發芯片進入睡眠狀態,控制器進入STOP狀態。由于控制器進入STOP狀態的功耗約為正常工作的1/10 000,而收發芯片睡眠狀態與收發狀態的功耗比也約為1/10 000,與空閑狀態的功耗比為11200左右,因此,該等待方式可有效減少節點的功耗,延長節點的使用壽命。
2.4 集裝箱定位
本系統通過傳感器網絡來確定集裝箱的位置。為達到定位的目的,假定2個事實作為前提:(1)堆場中集裝箱堆放區域位置信息已知;(2)所有堆放區域中所堆放的集裝箱都由且只由該堆放區域中的集裝箱起重機操作完成。這樣首先可通過起重機上的GPS裝置來確定起重機的位置,然后可通過獲得起重機正在操作集裝箱的位置信息,由于堆放區域內所有的集裝箱操作都是由起重機來完成的,因此一旦獲得起重機所操作的集裝箱的位置信息,便可獲得堆放區域中所有集裝箱位置的改變信息,從而確定每個集裝箱的位置。
集裝箱的位置信息由第2類節點根據收到第1類節點的信號強度計算獲得。MC13192芯片提供計算輸入信號強度的功能,并由SMAC層的接口函數提供給上層應用。其感應靈敏度如圖5所示,最小輸入信號強度可達-85 dBm。
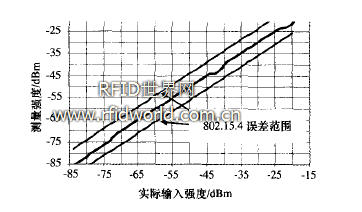
圖5 MC13192輸入信號靈敏度
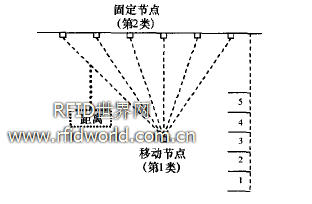
圖6 節點定位
3 結束語
本文給出將無線傳感器網絡和有源RFID技術應用于集裝箱管理的一個實際案例,完成了符合該次應用的傳感器網絡架構設計與傳輸協議設計,并將傳感器網絡的定位方案引入集裝箱管理當中。仿真結果證明,該設計可提高集裝箱查找效率,節約人力成本和時間成本。











