登錄
登錄
 注冊
注冊
從生物演化角度看自動駕駛發展路徑
編者按:
為推進車聯網產業發展,特邀請業內專家學者共同建言獻策,推出“車聯網百家談”系列。作為本系列第一期,周玉山博士和歐先國先生提出從生物演化角度看自動駕駛發展路徑,“L0-L5僅表達了當前主流的人-車維度分級方式,我們還可以引入道路、網絡、法規等因素,形成更為復雜的方案配比,提供更多的路線選擇”,“L5不是自動駕駛唯一最佳的終極目標”,未來只要能演化成功的自動駕駛路徑都應該是合理的,比如“20%人,30%車,50%路”,而不是盲目追求最聰明的車。期待通過作者獨特的視角和觀點,帶給讀者不一樣的啟發。
前言
近年來,隨著人工智能技術的突飛猛進,自動駕駛在各種場景中也得到了越來越廣泛的應用。然而,安全事故的頻發和商業模式的缺失,讓人們不得不重新思考一系列問題:相關技術是否已經滿足大規模應用的要求?“人和車”、“車和路”、“無人車和有人車”,“技術和規則”……種種交通要素應當如何聯結?各種運營模式是否存在最優的組合方案?
本文嘗試從生物演化的角度對自動駕駛發展路徑進行探討,希望為業內人士提供自動駕駛技術和模式發展的另一種思路。
01
技術發展的“漸進式”特征
“漸進”是生物演化的一大特征。從最初的單細胞生物體,到今天種類繁多的各種生物,演化過程有著清晰連續的化石痕跡。比如鳥類翅膀的演化,雖然現代鳥類的翅膀形態和其先祖恐龍的爪子外觀大相徑庭,但骨骼構造基本一致,而且可以看出明顯的沿襲關系。


技術的發展是否也是逐漸變化的?技術發展在一定程度上是“設計”的結果,呈現“階梯式”變化的性質,似乎并不完全是漸變式發展。
然而在基礎理論沒有突破性發展的前提下,特別是在某一個技術體系框架之內,由于各種條件的限制,人們通常只能在前人的研究基礎上進行改良式創新。
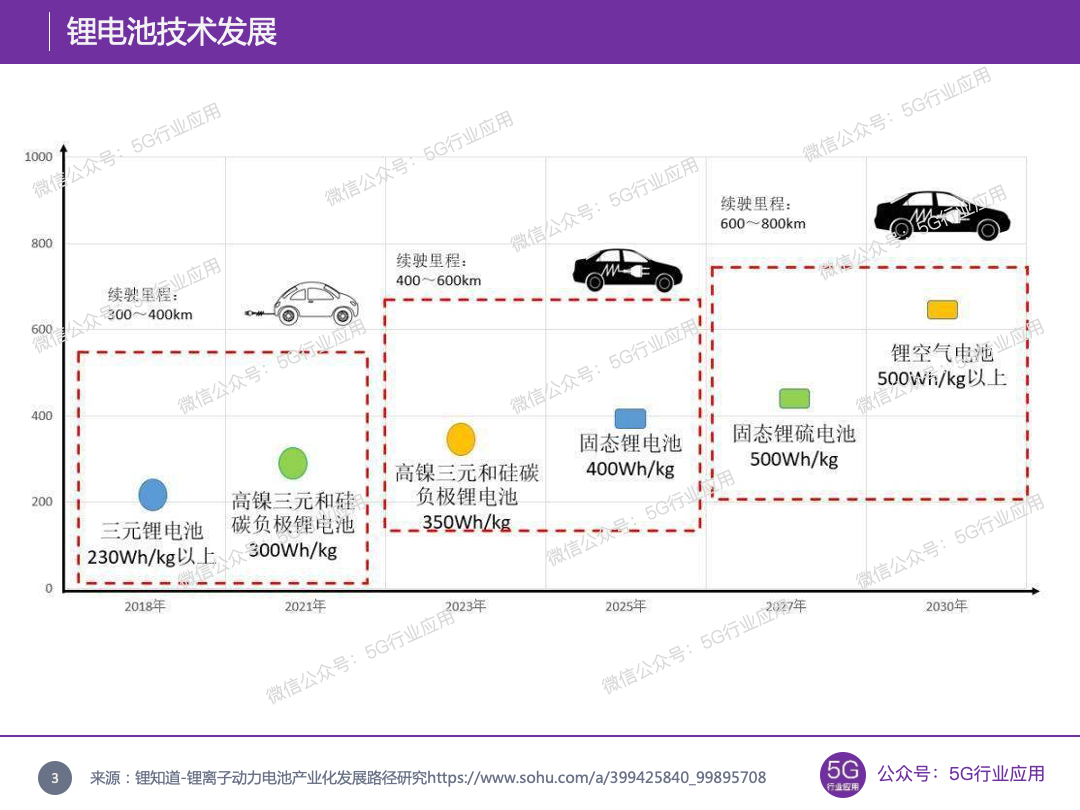
因此,在同一個“臺階水平”上,技術演變基本呈現“漸進式”發展的特征。以鋰電池為例,其內在化學體系提出至今,材料構成、機械結構以及各方面性能的變化,都遵循“逐漸發生”的變化邏輯,本質上沒有明顯的顛覆性突變。
因此,也許可以借用演化論的思想,對技術發展路徑進行一定的梳理和分析。
02
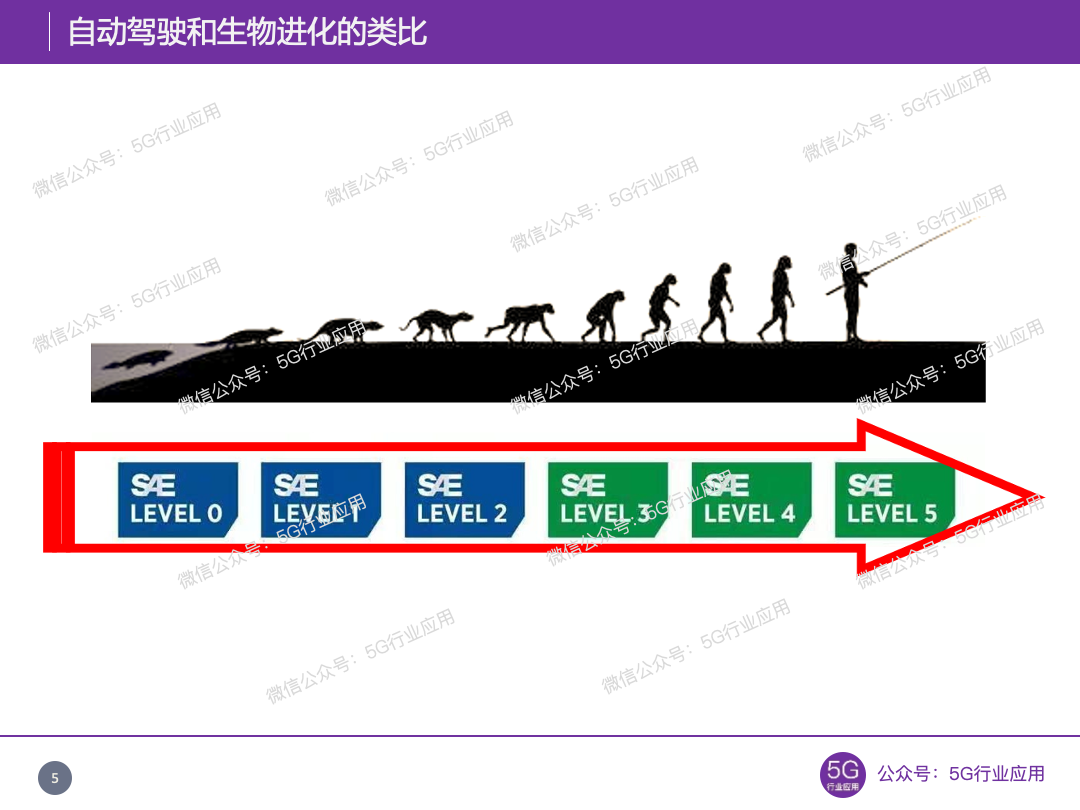
自動駕駛分級和生物的進化
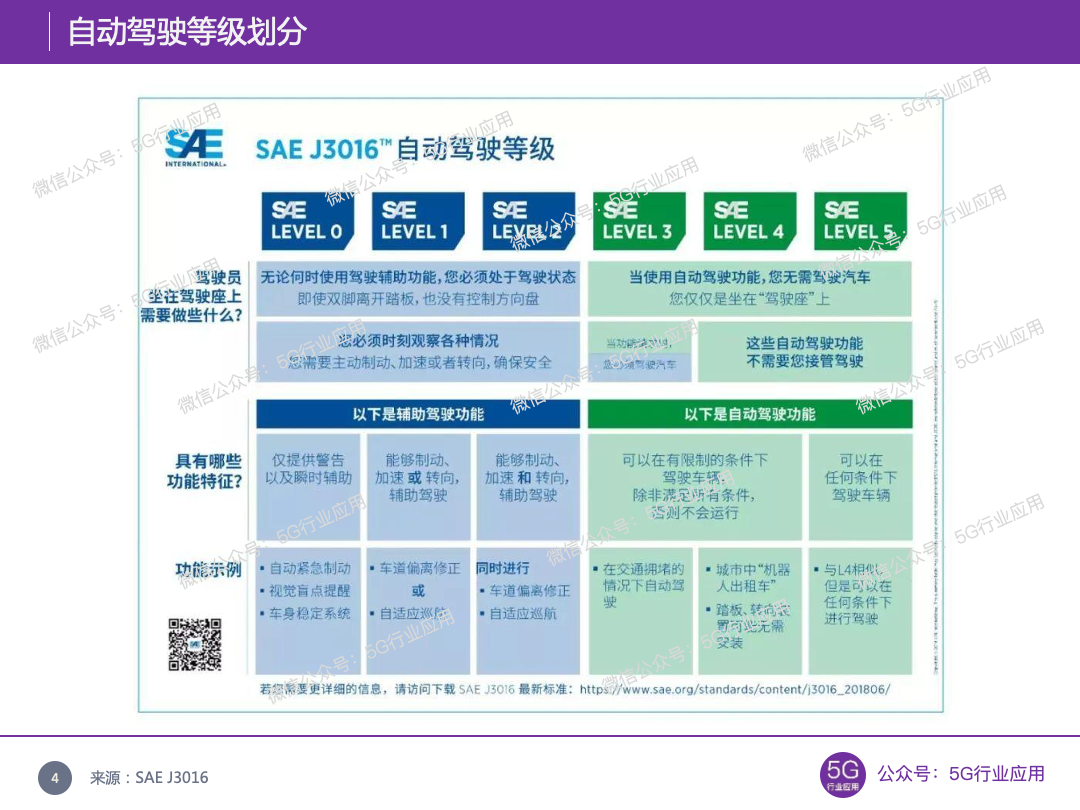
對于自動駕駛的發展,最廣為人知的是SAE J3016的等級劃分方式。這一分級標準明顯有著逐步演進的特征,很容易令人聯想到生物的進化。
自動駕駛的“進化”邏輯。這種“類似生物的進化”的聯想,會帶來兩點強烈的暗示:
暗示一:L5級別的完全自動駕駛,是自動駕駛的終極狀態。各種技術的發展,都是為了實現這一目標;
暗示二:自動駕駛技術是從L0至L5,逐步連續發展變化的。
假如以上暗示成立,可以推出幾點邏輯悖論:
悖論一:L3 級自動駕駛難以推廣。一方面,“逐步發展”意味著L3是不可跨越的必經階段;另一方面,L3又要求駕駛員在沒有任何操作的同時,始終保持注意力集中在路面上,隨時準備接管車輛,這種狀況是難以長時間持續的;
悖論二:車聯網和車路協同相關研究工作都將成為“過渡狀態”。作為終極目標的L5,要求車輛能夠在任何條件下自動駕駛,意味著未來的場景是能夠完全脫離網絡支持。換言之,網絡和外界支持終將退出系統;
悖論三:安全員的產品導向問題。由于當前大部分地區的法規要求,自動駕駛車輛必須配備安全員。而安全員的存在,必然會對車輛軟硬件設置及技術路線的選擇產生影響。在這樣的情況下,一旦法規允許取消安全員,車輛將難以 “逐漸演化”為完全無人的技術狀態。
03
“不可逆”的進化路徑
讓我們暫時放下以上悖論,看看進化論如何分析這些問題:上文所述的兩點暗示,從進化論的角度,可以類比為以下兩個命題:
命題一:人類是進化的頂峰,是進化的終極狀態;
命題二:生物大致沿著魚類-兩棲類-爬行類-低等哺乳類-靈長類-人類的路徑演化。
人類是否進化的頂峰?在討論這一命題之前,首先要厘清“頂峰”的評判標準。進化的評判標準只有一個——生存能力。活下來的,就是成功者。以這一標準來評價,人類在惡劣的自然環境面前的生存能力,其實遠遠不如低等動物如蟑螂、老鼠。不用說和更低等的單細胞生物相比了。

人類的演化路徑人類是不是沿著魚類-兩棲類……靈長類的路徑逐漸演化而來的?換句話說,人是不是從猴子變來的?下圖是進化樹的環形示意圖,圖中圓環中心代表物種的起源,越接近圓周的物種,代表年代越晚。
我們今天所能看到物種,都被標注在圓環邊緣之上。可以清晰的看到,從5.4億年前原始的魚類進化到今天的人類,進化樹產生了多次分支(生殖隔離),進化路徑經歷了多次選擇。
目前多數考古學家認為,距今1000-2000萬年前,東非大裂谷地區的森林古猿,在地殼強烈運動造成的氣候和地形劇變之下,完成了最為關鍵的一次路徑選擇。他們從森林走向稀樹草原,下到地面生活,開始直立行走,從而逐步演化成為今天的智人。
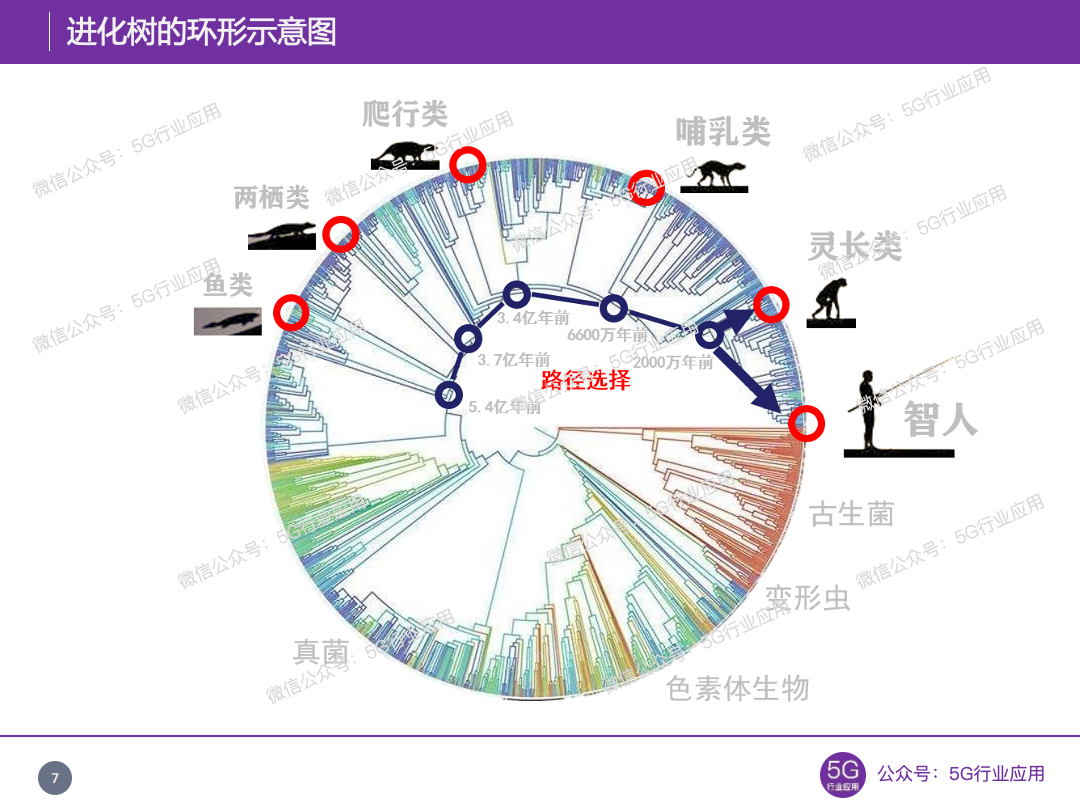
可以說人是從猴子變來的,但“猴子”不是今天的猴子,而是2000萬年前的“猴子”。我們今天看到的猴子,在2000萬年前已經走上了一條和人類完全不同的岔路,不可能再演化成為人類了。結合以上兩點分析,可以得出以下觀點:
觀點一:“適者皆王”,生存到今天的物種,都是演化的成功者。只有路徑選擇不同,沒有高低優劣之分;
觀點二:路徑選擇至關重要,不同的選擇導致不同的結果。選擇是不可逆的,一旦選擇完成便不可更改。
04
自動駕駛演化論
自動駕駛分級標準的重新認知類比生物演化過程,對自動駕駛分級進行分析,同樣需要一個關鍵要素——評判標準。2019年9月,中共中央、國務院印發的《交通強國建設綱要》提出了明確的指標:“構建安全、便捷、高效、綠色、經濟的現代化綜合交通體系”。
自動駕駛是為交通運輸服務的,是否滿足安全、便捷、高效、綠色、經濟的要求(以下簡稱“核心目標”),應該成為判斷自動駕駛技術以及應用效果優劣的最高指標。因此,對自動駕駛分級,更為合理的解讀應該是這樣的:
解讀一:L0-L5是發展路線的選擇,數字只是代號,沒有優劣之分。L5不是唯一最佳的終極目標;
解讀二:選擇了某一條發展路徑之后,技術及應用應當向著更好地滿足“核心目標”的要求發展,而不僅僅以L5為目標。
“自動駕駛演化樹”參照環形進化樹,可以作出“自動駕駛演化樹”的示意圖如下。
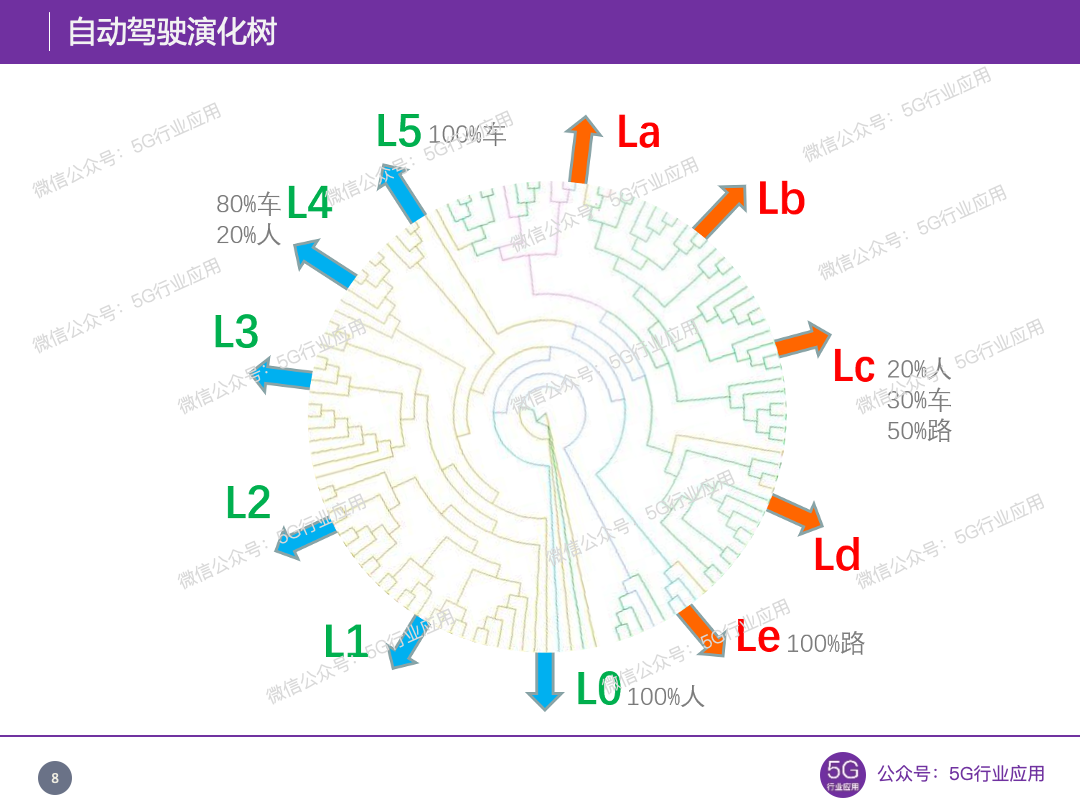
越接近圓周的方案,能夠越好地滿足“核心目標”的要求。圖中L0-L5代表“人”和“車”對車輛駕駛的權重配比。例如,選擇了L4方案,意味著將以80%車、20%人的權重配比進行技術開發和應用模式探索。
隨著技術的發展,最終產品應越來越好地滿足“核心目標”的要求。在整個開發過程中,人和車的權重應保持基本穩定。值得注意的是,圖中的L0-L5,僅表達了當前主流的 “人-車維度”的分級方式。
我們還可以引入道路、網絡、法規等因素,形成更為復雜的方案配比,提供更多的路線選擇。如圖中La-Le所示的其他各種方案。綜上所述,在現有技術條件下,如何選擇合理發展路徑,在人、車、路、網、法規等要素之間尋求最佳結合點,應當成為自動駕駛下一階段發展的重要研究課題。
05
后記
自動駕駛作為未來交通出行中的一項關鍵技術組合,是復雜系統中的重要組成部分。任何對其抽象化、簡單化的描述,都難以囊括所有內涵。
本文觀點并非獨辟蹊徑,實際上,當前一些大型車企發布的自動駕駛白皮書中關于發展路徑選擇的論述,以及部分車企“跳過L3,直接進行L4開發”的戰略”,都隱含了類似的思路。
本文嘗試從演化論角度進行思考,試圖對自動駕駛整體發展進行相對系統的梳理,希望業界同仁避免落入“唯技術化”、盲目追求“最聰明的車”的牛角尖中。技術的發展有其自身規律。遵循規律,順勢而為,當可水到渠成。
本文經5G行業應用授權轉載。