登錄
登錄
 注冊
注冊
光電與 RFID 導引物流機器人設計
作者:鮑勇
來源:RFID世界網
日期:2009-12-15 09:11:22
摘要:物流導引機器人運動導航、位置控制和路徑優化是工業物流自動化的關鍵技術, 而基于RFID 技術實現運動軌跡中的關鍵點定位與導引, 輔助使用光傳感器與平面電子羅盤實現機器人運動和姿態控制, 采用任務控制的方式實現系統功能, 是一種新型的物流機器人導引和控制方式, 具有成本低、智能化水平高、系統結構簡單可靠的特點, 是智能物流導引機器人新興的研究與應用方向。
1 光電與RFID 物流機器人總體結構設計
光電與RFID 導引物流機器人系統是三層架構的系統, 分為系統層、控制層和執行層。由系統控制軟件系統、機器人本體控制系統、機器人傳感器采集、機器人運動執行、機器人運行場地及RFID 標簽、無線通訊鏈路等組成。系統結構層次圖如圖1 所示。
控制層是光電與RFID 導引物流機器人控制系統中的一個中間環節, 是接收系統層相關命令或任務信息, 調配給各執行機構的樞紐; 是采集各個傳感器元件信息, 通過無線通訊鏈路反饋給系統控制軟件的樞紐; 是機器人自身系統功能自動檢測, 運行中障礙物判定和信息反饋的樞紐; 主要由安裝在機器人本體上的單片機控制器和無線通訊鏈路組成。
執行層是光電與RFID導引物流機器人控制系統的終端, 由機器人軌跡探測信息、外部按鍵控制信息、機器人姿態信息等信息采集終端;機器人前進后退, 姿態調整等驅動終端組成。本系統中主要的RFID 信息采集也在執行層。
實際應用中的光電與RFID導引物流機器人系統還應有相應的輔助系統(元件) 支持, 主要包括機器人運動場地、RFID 標簽和RFID 標簽信息寫入器等。
2 光電與RFID 物流機器人硬件系統
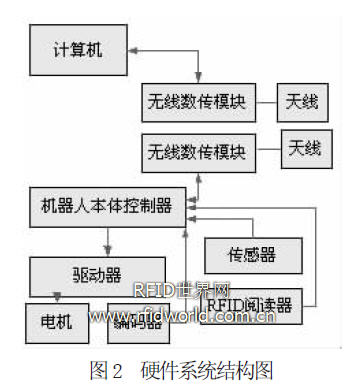
光電與RFID導引物流機器人硬件系統主要由計算機、無線數據傳輸模塊、機器人本體控制器、電機及驅動器、編碼器、傳感器、RFID閱讀器等組成。光電與RFID 導引物流機器人硬件系統結構圖如圖2 所示。
無線數據傳輸模塊是光電與RFID導引物流機器人系統層與控制層間的數據鏈路, 是實現系統控制的重要環節。無線數據傳輸模塊由發射器和接收器組成, 發射器與接收器是同頻模塊, 也可以一臺發射器多臺接收器, 其通訊控制采用主從式(點名式) 控制方式, 詳細控制方式依據通訊協議進行信息交互。機器人本體控制器是光電與RFID 導引物流機器人控制層的核心, 主要采用AVR 單片機MEGA128 芯片作為控制核心, 輔助有DI、DO 接口電路, 與無線數據傳輸模塊通過RS232 接口通訊, 與執行元件間通過UART、DI 等接口通訊。
光電與RFID導引物流機器人的電機采用大扭矩直流減速電機, 驅動器采用H橋PWM調速方式驅動, 可以實現對電機運行速度控制。編碼器是配合直流減速電機使用的運動反饋元件, 主要實現電機運行距離信息的反饋, 用來動態平衡調節兩臺直流減速電機自身的速度差異, 作為機器人姿態調整的輔助元件之一。
傳感器是光電與RFID導引物流機器人中的主要信息采集器件, 包括有光電色差傳感器、紅外避障探測傳感器、平面電子羅盤等。RFID閱讀器是光電與RFID導引物流機器人中的重要信息采集元件, 安裝在機器人本體上, 用于采集機器人運動軌跡中的RFID標簽信息。
3 光電與RFID 物流機器人軟件系統設計
光電與RFID導引物流機器人軟件系統包括系統控制軟件和機器人本體控制器控制軟件兩部分。
系統控制軟件是光電與RFID導引物流機器人軟件系統的核心, 采用C# 開發, 具有遙控運行、命令控制和任務控制的功能, 可以實現運行路徑的實時監控和信息存儲。系統控制中的路徑優化算法和控制命令等都是由系統控制軟件發出。
機器人本體控制軟件是針對單片機運行的底層控制軟件, 主要是將系統控制軟件的信息翻譯成為各個執行元件的控制命令信息, 將采集到的相關信息翻譯并傳送回系統控制軟件。機器人本體控制軟件應用GCC 開發軟件開發。
4 光電與RFID 物流機器人輔助系統設計
光電與RFID 導引物流機器人輔助系統由機器人運動場地和RFID標簽組成。機器人運動場地是RFID 智恩那個物流導引機器人系統的應用場所, 而給予RFID 和光電磁導引的機器人場地, 以白色(淺色) 為底色, 在需要運動的路徑鋪設黑色(深色) 的軌跡線, 為機器人運動提供基準路徑。RFID 標簽是指定的路徑的關鍵點位的標志, 在標簽內寫入場地的點位坐標, 作為導引路徑的點坐標。
光電與RFID 導引物流機器人系統是三層架構的系統, 分為系統層、控制層和執行層。由系統控制軟件系統、機器人本體控制系統、機器人傳感器采集、機器人運動執行、機器人運行場地及RFID 標簽、無線通訊鏈路等組成。系統結構層次圖如圖1 所示。

控制層是光電與RFID 導引物流機器人控制系統中的一個中間環節, 是接收系統層相關命令或任務信息, 調配給各執行機構的樞紐; 是采集各個傳感器元件信息, 通過無線通訊鏈路反饋給系統控制軟件的樞紐; 是機器人自身系統功能自動檢測, 運行中障礙物判定和信息反饋的樞紐; 主要由安裝在機器人本體上的單片機控制器和無線通訊鏈路組成。
執行層是光電與RFID導引物流機器人控制系統的終端, 由機器人軌跡探測信息、外部按鍵控制信息、機器人姿態信息等信息采集終端;機器人前進后退, 姿態調整等驅動終端組成。本系統中主要的RFID 信息采集也在執行層。
實際應用中的光電與RFID導引物流機器人系統還應有相應的輔助系統(元件) 支持, 主要包括機器人運動場地、RFID 標簽和RFID 標簽信息寫入器等。
2 光電與RFID 物流機器人硬件系統
光電與RFID導引物流機器人硬件系統主要由計算機、無線數據傳輸模塊、機器人本體控制器、電機及驅動器、編碼器、傳感器、RFID閱讀器等組成。光電與RFID 導引物流機器人硬件系統結構圖如圖2 所示。
無線數據傳輸模塊是光電與RFID導引物流機器人系統層與控制層間的數據鏈路, 是實現系統控制的重要環節。無線數據傳輸模塊由發射器和接收器組成, 發射器與接收器是同頻模塊, 也可以一臺發射器多臺接收器, 其通訊控制采用主從式(點名式) 控制方式, 詳細控制方式依據通訊協議進行信息交互。機器人本體控制器是光電與RFID 導引物流機器人控制層的核心, 主要采用AVR 單片機MEGA128 芯片作為控制核心, 輔助有DI、DO 接口電路, 與無線數據傳輸模塊通過RS232 接口通訊, 與執行元件間通過UART、DI 等接口通訊。
光電與RFID導引物流機器人的電機采用大扭矩直流減速電機, 驅動器采用H橋PWM調速方式驅動, 可以實現對電機運行速度控制。編碼器是配合直流減速電機使用的運動反饋元件, 主要實現電機運行距離信息的反饋, 用來動態平衡調節兩臺直流減速電機自身的速度差異, 作為機器人姿態調整的輔助元件之一。
傳感器是光電與RFID導引物流機器人中的主要信息采集器件, 包括有光電色差傳感器、紅外避障探測傳感器、平面電子羅盤等。RFID閱讀器是光電與RFID導引物流機器人中的重要信息采集元件, 安裝在機器人本體上, 用于采集機器人運動軌跡中的RFID標簽信息。
3 光電與RFID 物流機器人軟件系統設計
光電與RFID導引物流機器人軟件系統包括系統控制軟件和機器人本體控制器控制軟件兩部分。
系統控制軟件是光電與RFID導引物流機器人軟件系統的核心, 采用C# 開發, 具有遙控運行、命令控制和任務控制的功能, 可以實現運行路徑的實時監控和信息存儲。系統控制中的路徑優化算法和控制命令等都是由系統控制軟件發出。
機器人本體控制軟件是針對單片機運行的底層控制軟件, 主要是將系統控制軟件的信息翻譯成為各個執行元件的控制命令信息, 將采集到的相關信息翻譯并傳送回系統控制軟件。機器人本體控制軟件應用GCC 開發軟件開發。
4 光電與RFID 物流機器人輔助系統設計
光電與RFID 導引物流機器人輔助系統由機器人運動場地和RFID標簽組成。機器人運動場地是RFID 智恩那個物流導引機器人系統的應用場所, 而給予RFID 和光電磁導引的機器人場地, 以白色(淺色) 為底色, 在需要運動的路徑鋪設黑色(深色) 的軌跡線, 為機器人運動提供基準路徑。RFID 標簽是指定的路徑的關鍵點位的標志, 在標簽內寫入場地的點位坐標, 作為導引路徑的點坐標。