登錄
登錄
 注冊
注冊
基于 RFID 的天車避碰系統的設計
作者:黎洪生,肖鵬,劉蘇敏,付海波
來源:RFID世界網
日期:2009-05-13 14:45:19
摘要:基于RFID的無線天車避碰系統,給出了天車定位方案的工作原理、對系統硬件和軟件進行了設計。在天車運行的過程中,實現對兩個天車之間距離的監測,聲光報警、停車控制。與傳統的天車避碰系統相比,由于采用RFID定位技術和無線數據傳輸技術,使系統受到的環境影響很小,數據傳輸范圍大,定位精度較高。
1 引言
天車是橋式起重機的簡稱,它是橋架在高架軌道上運行的一種橋架型起重機,天車的橋架沿鋪設在兩側高架上的軌道縱向運行,起重小車沿鋪設在橋架上的軌道橫向運行,構成一個矩形的工作范圍,就可以充分利用橋架下面的空間吊運物料,不受地面設備的阻礙。有的現場是在一個車間里同時有兩臺或兩臺以上的天車。在視角很小的情況下,天車司機要想準確控制天車的位置是很困難的,有可能因操作而發生天車碰撞的事故,造成人員、設備、財產的重大損失。考慮到以上因素,本設計利用RFD定位,并采用nR 05無線傳輸模塊傳輸兩臺天車的各自位置信息,再由控制器做出動態LED位置顯示、行駛方向判斷、近距離報警、停車控制。與傳統的天車防碰裝置相比,系統受環境的影響小,不受視距影響,提高了系統控制的精確度。因此,基于RFID的無線天車避碰系統將逐步取代傳統天車避碰系統。
2 系統構成
在本系統中。需要控制和監測的兩臺天車處于同一車問的上下兩條軌道上,示意平面圖如下圖1所示:
首先在上下天車駕駛室上分別固定上一個RFID閱讀器,然后在靠近天車駕駛室的上天車軌道上每0.5m 貼上一個RFID標簽,下天車軌道上也是等距離的貼上RFID標簽。當一輛天車運動的時候。閱讀器也是跟著運動,同時讀取到不同卡片上的位置信息。我們給定上天車在圖1中XY平面上的坐標為:(x ,0),下天車在XY平面上的坐標為:(x ,0),那么兩天車在X軸方向上的距離是:
3 系統硬件設計
3.1 RFID模塊
RFID(Radio Frequency Identification)也就是射頻識別技術,RFID系統由3部分組成電子標簽(Tag)、讀卡器(Reader)和在標簽與讀卡器之間傳遞射頻信號的微型天線(Antenna)。
本設計選用讀卡器的型號是U HF遠距離一體化讀寫器,讀卡器工作頻率是902MHZ一928MHZ,內置水平極化天線,通信口可以是RS一232和RS-4852。通信速率由軟件設定,最高可達57600bps。可靠讀取距離15米電源是直流12V,平均功耗小于5瓦,工作溫度為-35。~+60。。標簽考慮到現場的金屬環境,選用的是防金屬的EPC可讀寫標簽。
3.2 無線傳輸模塊
系統中無線射頻收發芯片選用nRF905,nRF905是Nordic VLSI公司推出的單片射頻收發器, 工作電壓為1.9V~3.6V,工作于433MHz、868MHz、915MHz 3個ISM頻段,頻道轉換時間小于650μS,最大數據速率為100 Kbit/s。nRF905由頻率合成器、接收解調器、功率放大器、晶體振蕩器和GFSK 調制器組成。無需外加聲表面濾波器,ShockBurst工作模式,自動處理字頭和CRC,使用SPI接口與微控制器通信,配置方便。此外,其功耗低,以-10 dBm 輸出功率發射時電流僅11mA,工作在接收模式時電流為l2.5mA,具有空閑模式與關機模式,易于實現功率管理。
3.3 硬件電路的設計
4 系統的軟件設計
系統軟件如圖4所示,主要由初始化、讀取標簽信息、無線數據傳輸、數據處理,位置顯示、報警和停車部分組成。在本系統中,上下天車控制器中采用同一個程序,當一個天車讀卡器讀到一張標簽信息的時候,首先判斷是否是一張新的標簽信息,如果是新標簽,則存儲標簽信息,并且由nRF905無線模塊發動新標簽信息。接著系統檢測是否收到另外一臺讀卡器的發出的新標簽信息,如果收到就存儲。最后再由控制器分析處理標簽信息,控制天車位置顯示,運行方向顯示。判斷兩輛天車在水平方向上的距離,如果距離D,在3m<D2≤5m內,系統進行聲光報警,如果距離D,在0<D2≤3m 范圍內,停車信號輸出。
5 結束語
本設計選用基于RFID技術的方法,通過貼在天車軌道上的標簽來確定兩輛天車的位置,使天車避碰系統更加精確。同時采用的RFID和無線數據傳輸技術,使系統受環境和機械影響小。該系統作為天車運行的安全保護裝置,已成功應用在冶鋼天車安全控制中,使天車操作的工作效率提高,有效的避免了天車碰撞事故的發生。
天車是橋式起重機的簡稱,它是橋架在高架軌道上運行的一種橋架型起重機,天車的橋架沿鋪設在兩側高架上的軌道縱向運行,起重小車沿鋪設在橋架上的軌道橫向運行,構成一個矩形的工作范圍,就可以充分利用橋架下面的空間吊運物料,不受地面設備的阻礙。有的現場是在一個車間里同時有兩臺或兩臺以上的天車。在視角很小的情況下,天車司機要想準確控制天車的位置是很困難的,有可能因操作而發生天車碰撞的事故,造成人員、設備、財產的重大損失。考慮到以上因素,本設計利用RFD定位,并采用nR 05無線傳輸模塊傳輸兩臺天車的各自位置信息,再由控制器做出動態LED位置顯示、行駛方向判斷、近距離報警、停車控制。與傳統的天車防碰裝置相比,系統受環境的影響小,不受視距影響,提高了系統控制的精確度。因此,基于RFID的無線天車避碰系統將逐步取代傳統天車避碰系統。
2 系統構成
在本系統中。需要控制和監測的兩臺天車處于同一車問的上下兩條軌道上,示意平面圖如下圖1所示:

圖1 天車車間示意圖
首先在上下天車駕駛室上分別固定上一個RFID閱讀器,然后在靠近天車駕駛室的上天車軌道上每0.5m 貼上一個RFID標簽,下天車軌道上也是等距離的貼上RFID標簽。當一輛天車運動的時候。閱讀器也是跟著運動,同時讀取到不同卡片上的位置信息。我們給定上天車在圖1中XY平面上的坐標為:(x ,0),下天車在XY平面上的坐標為:(x ,0),那么兩天車在X軸方向上的距離是:


3 系統硬件設計
3.1 RFID模塊
RFID(Radio Frequency Identification)也就是射頻識別技術,RFID系統由3部分組成電子標簽(Tag)、讀卡器(Reader)和在標簽與讀卡器之間傳遞射頻信號的微型天線(Antenna)。
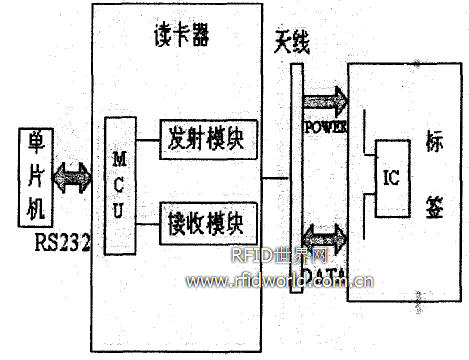
圖2 RFID工作原理圖
本設計選用讀卡器的型號是U HF遠距離一體化讀寫器,讀卡器工作頻率是902MHZ一928MHZ,內置水平極化天線,通信口可以是RS一232和RS-4852。通信速率由軟件設定,最高可達57600bps。可靠讀取距離15米電源是直流12V,平均功耗小于5瓦,工作溫度為-35。~+60。。標簽考慮到現場的金屬環境,選用的是防金屬的EPC可讀寫標簽。
3.2 無線傳輸模塊
系統中無線射頻收發芯片選用nRF905,nRF905是Nordic VLSI公司推出的單片射頻收發器, 工作電壓為1.9V~3.6V,工作于433MHz、868MHz、915MHz 3個ISM頻段,頻道轉換時間小于650μS,最大數據速率為100 Kbit/s。nRF905由頻率合成器、接收解調器、功率放大器、晶體振蕩器和GFSK 調制器組成。無需外加聲表面濾波器,ShockBurst工作模式,自動處理字頭和CRC,使用SPI接口與微控制器通信,配置方便。此外,其功耗低,以-10 dBm 輸出功率發射時電流僅11mA,工作在接收模式時電流為l2.5mA,具有空閑模式與關機模式,易于實現功率管理。
3.3 硬件電路的設計
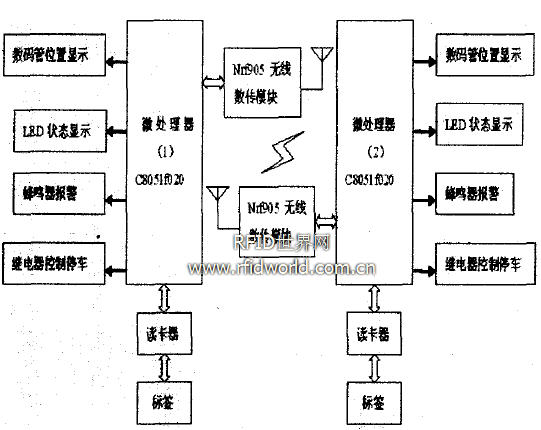
圖3 硬件系統框圖
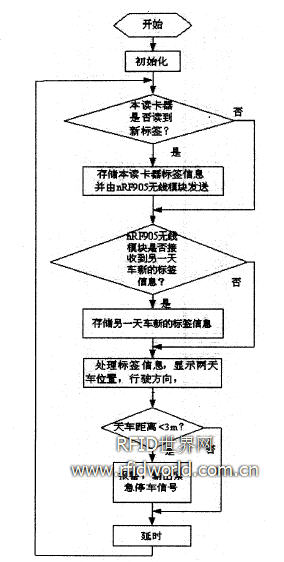
圖4 系統控制總圖
4 系統的軟件設計
系統軟件如圖4所示,主要由初始化、讀取標簽信息、無線數據傳輸、數據處理,位置顯示、報警和停車部分組成。在本系統中,上下天車控制器中采用同一個程序,當一個天車讀卡器讀到一張標簽信息的時候,首先判斷是否是一張新的標簽信息,如果是新標簽,則存儲標簽信息,并且由nRF905無線模塊發動新標簽信息。接著系統檢測是否收到另外一臺讀卡器的發出的新標簽信息,如果收到就存儲。最后再由控制器分析處理標簽信息,控制天車位置顯示,運行方向顯示。判斷兩輛天車在水平方向上的距離,如果距離D,在3m<D2≤5m內,系統進行聲光報警,如果距離D,在0<D2≤3m 范圍內,停車信號輸出。
5 結束語
本設計選用基于RFID技術的方法,通過貼在天車軌道上的標簽來確定兩輛天車的位置,使天車避碰系統更加精確。同時采用的RFID和無線數據傳輸技術,使系統受環境和機械影響小。該系統作為天車運行的安全保護裝置,已成功應用在冶鋼天車安全控制中,使天車操作的工作效率提高,有效的避免了天車碰撞事故的發生。