
 登錄
登錄
 注冊
注冊
基于GPS/GPRS的糧食物流車載終端系統設計
作者:甄彤 甄芝科 肖樂
來源:RFID世界網
日期:2009-05-05 10:14:31
摘要:針對糧食物流的特點,設計集RFID識別技術、GPS定位技術、GPRS通信技術、傳感器技術與一體的糧食物流車載終端,從而實現糧食物流運載終端的實時跟蹤定位、實時采集運輸過程中糧食相關狀況信息,以及與遠程控制中心的實時通信。
1 引言
糧食行業屬于傳統產業,同時也是關系到國計民生的行業,糧食物流安全是糧食安全的重要組成部分,所以利用高新技術提高其現代化水平勢在必行。近年來,全球衛星定位系統和無線通信技術的發展使得對移動目標進行實時定位和遠程監控調度成為可能。特別是通用分組無線業務(GPRS)的出現,更使得人們能夠對移動目標進行全國范圍、實時、全天候的監控調度。本文主要是研究設計基于RFID、GPS、GPRS和相關傳感器技術的車載終端。它的主要功能是能不斷獲取移動車輛上糧食的相關信息、車輛的位置狀態信息,并把這些信息通過無線通信設備發送到監控中心。同時,又能實時接受來自控制中心的指示。
2 總體設計分析
整個糧食物流車載終端主要由全GPS、GPRS、RFID、測試糧食狀態信息的傳感器、主控模塊組成。車輛在運行過程中,車載終端的GPS接收機接收定位衛星的定位數據,計算出自身所處地理位置的坐標;通過傳感器節點實時測試糧食當前狀態;RFID主要存儲糧食的等級,產地,出產13期等糧食狀況基本信息,同時用戶使用鍵盤,能往RFID寫入車載糧食的重量、等級信息;主控模塊對以上信息的處理,通過車載終端的通信模塊,利用GPRS網絡與遠程物流控制中心進行通信。
3 糧食物流車載終端的總體結構設計
為了達到糧食物流的智能管理的要求,實現物流運載終端的實時跟蹤定位、實時采集糧食相關狀況信息等目的,該車載終端除了利用GPS定位模塊獲取當前位置信息外,還配置RFID模塊和GPRS模塊、糧測相關傳感器模塊,以便實時采集和發送所需信息,并實現與接收監控中心通信。由此,運載終端的設計可劃分為五大功能模塊:控制處理模塊、RFID模塊、GPS模塊和GPRS模塊、糧測傳感器模塊,如圖1所示。
2)RFID模塊用于識別運載工具上糧食的信息,根據不同需求,信息可包括糧食產地、糧食重量、糧食品質等,并由控制處理器模塊讀寫、顯示,依據實際情況,可通過GPRS模塊發回監控中心。
3)GPS模塊用于接收GPS衛星發來的信號并解算出定位信息,也由控制處理模塊讀取、顯示,并可通過GPRS模塊發回監控中心。以便實時掌握運載工具的位置情況。
4)GPRS模塊主要功能是完成與GPRS網的連接,將經過控制處理模塊預處理后的各種功能模塊采集到的數據發回監控中心,以及接收監控中心發來的各種指令,并將其交給控制處理模塊處理。
5)糧測傳感器模塊重要是用來實時測量糧食當前溫濕等信息,并通過GPRS模塊發回監控中心,以便實時掌握糧食當前狀態信息。
4 車載終端硬件設計實現
該終端在選型時,在滿足使用要求的基礎上,主要的選擇目標是體積重量小、能耗低的產品以滿足車載的要求,主要硬件如下:
1)MCU選用超低功耗型MSP430系列16位單片機MSP43OF149,片內有豐富的外設,可實現異步、同步及多址訪問的串行通信接口(USART0~ 1)以及液晶顯示驅動模塊,最多可達6×8條I/O線,可以滿足本本終端需要。
2)GPS接收單元采用~-blox的GPS-MS1E,MCU對GPS的控制是通過串行口UART0發送命令和接收GPS信息。
3)GPRS模塊采用SIEMENS的MC35i,MC35i支持GSM/GPRS雙摸模塊,其體積小,功耗底,能提供數據、語音、短信、傳真等功能,GPRS模塊通過串行口UART0與主控芯片通信。
4)RFID模塊的閱讀器采Tag Master公司生產的RFID識別系統S1566系列。TagMaster的射頻識別(RFID)閱讀器有極可靠的設計、極佳的性能和極靈活的用戶適應性。
5)MCU與其他外圍接口的控制通過通用I/O口實現。
5 軟件系統設計
采用模塊化結構程序設計方法進行設計,即根據不同功能分別進行編寫和調試,等到各個模塊都調試成功后,將各個模塊連成整體,組成軟件系統。這樣的設計思路有利于程序代碼的編寫和優化,也便于調試和日后的維護等工作。
車載終端軟件完成的主要內容包括:模塊及MCU的初始化、信息采集、數據處理、LCD顯示、與上位機通信等。當系統上電初始化后,根據不同要求,利用外部中斷按鈕或等待遠程命令選擇功能模塊。針對不同工作模式,通過對多路串行通道的設置,發送或讀取所需的數據或狀態信息。對采集所得的數據預處理后保存在外部RAM,通過LCD顯示出來(包括目前運載工具內貨物數量、總類、各自編碼或運載工具定位信息等),并由用戶按鍵確認后返回,即可了解糧食運載過程中實時狀況,并發送到遠程終端。
監控中心的主要作用就是遠程獲取運載終端信息,實現對運載工具的實時管理和調度。這樣就需要在監控中心和運載終端之間建立一套通信機制,時刻監聽從GPRS和Internet網絡傳送過來的運載終端數據。而Socket API正好滿足了這一需求。Socket實際在計算機中提供了一個通信端口這里不做詳細介紹。這里主要介紹該車載終端與遠程控制中心的通信協議設計。
要實現運載終端與監控中心間的通信除了需要時刻監聽網絡端口外,還必需要有一套可靠的通信協議,這個協議必須是通信雙方都認可的、且能識別的。本系統規定協議每條指令由16進制碼組成,以Ox02開始,以OxFF結尾,并分為指令協議和響應協議兩個子協議,格式定義如下:
其中ID0~ID2是運載工具的ID號,指令具體定義如表1所示:
7 結語
當今倍受矚目的新技術,射頻識別技術、定位技術、傳感器技術以及無線通信技術在未來將深入到物流業的各個方面,本文通過對這些技術的綜合運用設計糧食物流車載終端,本系統是一個以RFID和糧測傳感器作為糧食信息采集手段,以GPS定位數據定位基礎,GPRS網絡作為承載網絡,同時充分考慮了實際需求,設計的一種新型糧食車載終端,同時這種綜合運用各種先進技術提高傳統行業安全及效率的思想無疑對加快提高我國傳統行業現代化水平有重要意義。
糧食行業屬于傳統產業,同時也是關系到國計民生的行業,糧食物流安全是糧食安全的重要組成部分,所以利用高新技術提高其現代化水平勢在必行。近年來,全球衛星定位系統和無線通信技術的發展使得對移動目標進行實時定位和遠程監控調度成為可能。特別是通用分組無線業務(GPRS)的出現,更使得人們能夠對移動目標進行全國范圍、實時、全天候的監控調度。本文主要是研究設計基于RFID、GPS、GPRS和相關傳感器技術的車載終端。它的主要功能是能不斷獲取移動車輛上糧食的相關信息、車輛的位置狀態信息,并把這些信息通過無線通信設備發送到監控中心。同時,又能實時接受來自控制中心的指示。
2 總體設計分析
整個糧食物流車載終端主要由全GPS、GPRS、RFID、測試糧食狀態信息的傳感器、主控模塊組成。車輛在運行過程中,車載終端的GPS接收機接收定位衛星的定位數據,計算出自身所處地理位置的坐標;通過傳感器節點實時測試糧食當前狀態;RFID主要存儲糧食的等級,產地,出產13期等糧食狀況基本信息,同時用戶使用鍵盤,能往RFID寫入車載糧食的重量、等級信息;主控模塊對以上信息的處理,通過車載終端的通信模塊,利用GPRS網絡與遠程物流控制中心進行通信。
3 糧食物流車載終端的總體結構設計
為了達到糧食物流的智能管理的要求,實現物流運載終端的實時跟蹤定位、實時采集糧食相關狀況信息等目的,該車載終端除了利用GPS定位模塊獲取當前位置信息外,還配置RFID模塊和GPRS模塊、糧測相關傳感器模塊,以便實時采集和發送所需信息,并實現與接收監控中心通信。由此,運載終端的設計可劃分為五大功能模塊:控制處理模塊、RFID模塊、GPS模塊和GPRS模塊、糧測傳感器模塊,如圖1所示。

圖1 車載終端結構
2)RFID模塊用于識別運載工具上糧食的信息,根據不同需求,信息可包括糧食產地、糧食重量、糧食品質等,并由控制處理器模塊讀寫、顯示,依據實際情況,可通過GPRS模塊發回監控中心。
3)GPS模塊用于接收GPS衛星發來的信號并解算出定位信息,也由控制處理模塊讀取、顯示,并可通過GPRS模塊發回監控中心。以便實時掌握運載工具的位置情況。
4)GPRS模塊主要功能是完成與GPRS網的連接,將經過控制處理模塊預處理后的各種功能模塊采集到的數據發回監控中心,以及接收監控中心發來的各種指令,并將其交給控制處理模塊處理。
5)糧測傳感器模塊重要是用來實時測量糧食當前溫濕等信息,并通過GPRS模塊發回監控中心,以便實時掌握糧食當前狀態信息。
4 車載終端硬件設計實現
該終端在選型時,在滿足使用要求的基礎上,主要的選擇目標是體積重量小、能耗低的產品以滿足車載的要求,主要硬件如下:
1)MCU選用超低功耗型MSP430系列16位單片機MSP43OF149,片內有豐富的外設,可實現異步、同步及多址訪問的串行通信接口(USART0~ 1)以及液晶顯示驅動模塊,最多可達6×8條I/O線,可以滿足本本終端需要。
2)GPS接收單元采用~-blox的GPS-MS1E,MCU對GPS的控制是通過串行口UART0發送命令和接收GPS信息。
3)GPRS模塊采用SIEMENS的MC35i,MC35i支持GSM/GPRS雙摸模塊,其體積小,功耗底,能提供數據、語音、短信、傳真等功能,GPRS模塊通過串行口UART0與主控芯片通信。
4)RFID模塊的閱讀器采Tag Master公司生產的RFID識別系統S1566系列。TagMaster的射頻識別(RFID)閱讀器有極可靠的設計、極佳的性能和極靈活的用戶適應性。
5)MCU與其他外圍接口的控制通過通用I/O口實現。
5 軟件系統設計
采用模塊化結構程序設計方法進行設計,即根據不同功能分別進行編寫和調試,等到各個模塊都調試成功后,將各個模塊連成整體,組成軟件系統。這樣的設計思路有利于程序代碼的編寫和優化,也便于調試和日后的維護等工作。
車載終端軟件完成的主要內容包括:模塊及MCU的初始化、信息采集、數據處理、LCD顯示、與上位機通信等。當系統上電初始化后,根據不同要求,利用外部中斷按鈕或等待遠程命令選擇功能模塊。針對不同工作模式,通過對多路串行通道的設置,發送或讀取所需的數據或狀態信息。對采集所得的數據預處理后保存在外部RAM,通過LCD顯示出來(包括目前運載工具內貨物數量、總類、各自編碼或運載工具定位信息等),并由用戶按鍵確認后返回,即可了解糧食運載過程中實時狀況,并發送到遠程終端。
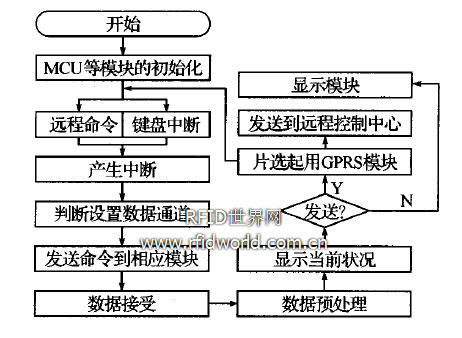
圖2 終端軟件主要流程
監控中心的主要作用就是遠程獲取運載終端信息,實現對運載工具的實時管理和調度。這樣就需要在監控中心和運載終端之間建立一套通信機制,時刻監聽從GPRS和Internet網絡傳送過來的運載終端數據。而Socket API正好滿足了這一需求。Socket實際在計算機中提供了一個通信端口這里不做詳細介紹。這里主要介紹該車載終端與遠程控制中心的通信協議設計。
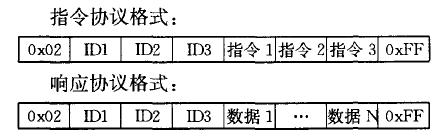
要實現運載終端與監控中心間的通信除了需要時刻監聽網絡端口外,還必需要有一套可靠的通信協議,這個協議必須是通信雙方都認可的、且能識別的。本系統規定協議每條指令由16進制碼組成,以Ox02開始,以OxFF結尾,并分為指令協議和響應協議兩個子協議,格式定義如下:
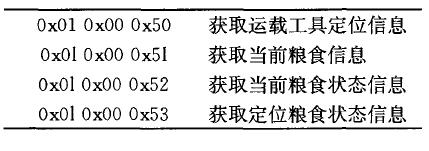
其中ID0~ID2是運載工具的ID號,指令具體定義如表1所示:
7 結語
當今倍受矚目的新技術,射頻識別技術、定位技術、傳感器技術以及無線通信技術在未來將深入到物流業的各個方面,本文通過對這些技術的綜合運用設計糧食物流車載終端,本系統是一個以RFID和糧測傳感器作為糧食信息采集手段,以GPS定位數據定位基礎,GPRS網絡作為承載網絡,同時充分考慮了實際需求,設計的一種新型糧食車載終端,同時這種綜合運用各種先進技術提高傳統行業安全及效率的思想無疑對加快提高我國傳統行業現代化水平有重要意義。













